


„Od okamžiku, kdy jsem Seymoura Paperta poprvé uslyšel, jsem jím byl naprosto fascinován. Oběma nám bylo jasné, že bychom měli navázat spolupráci. Sdíleli jsme přesně ty samé hodnoty a názory na vzdělávání se pomocí hry. Měl obrovský vliv na naše nápady a celkový přístup ke vzdělávání.“
Kjeld Kirk Kristiansen

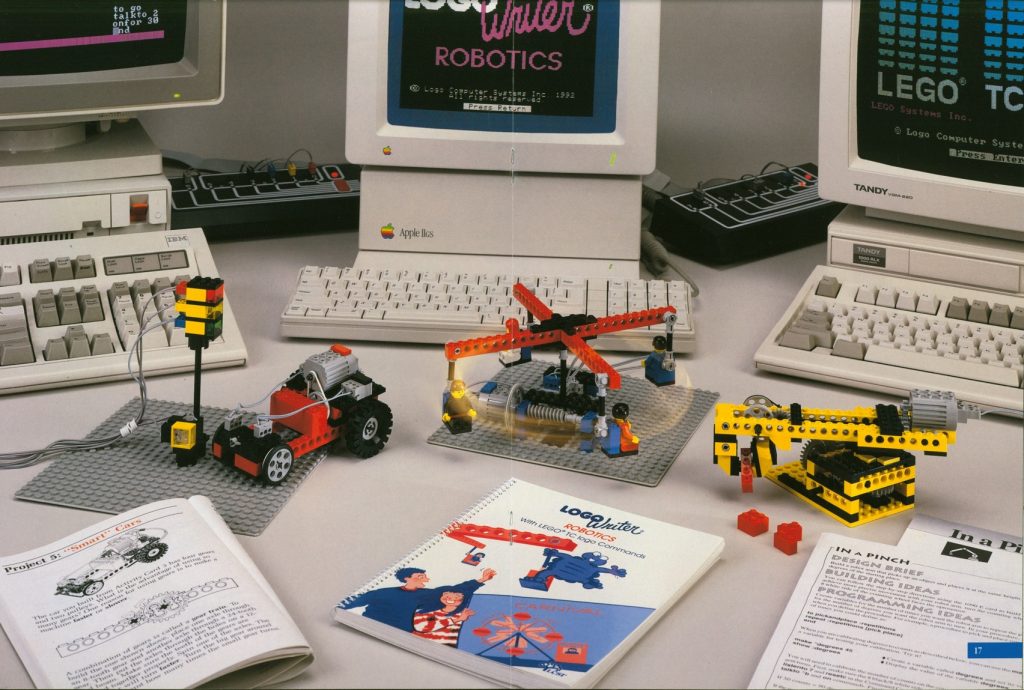
„Programování je velmi podobné hře s kostkami LEGO – jedná se o strukturovaný a zároveň velmi kreativní proces.“
Jørgen Vig Knudstorp
CEO LEGO Group 2004 – 2017

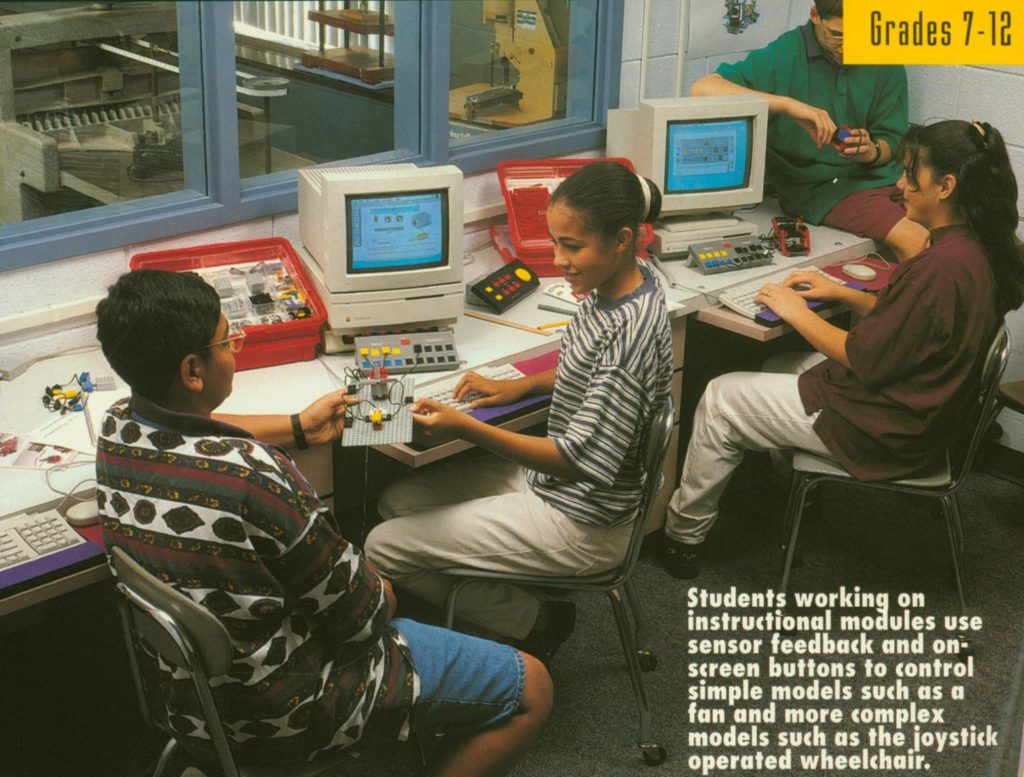
„Když se učíte programovat, téměř nikdy se vám nepovede napsat kód na první pokus. Musíte proto najít a opravit ‚bugy‘. Pokud bychom tuto zkušenost měli všichni, nebyli bychom tolik vystrašeni z toho, že uděláme chybu.“
Seymour Papert









 v Brně a Litoměřicích.
v Brně a Litoměřicích.{kind=link}
{kind=link}